 Loops House
Loops House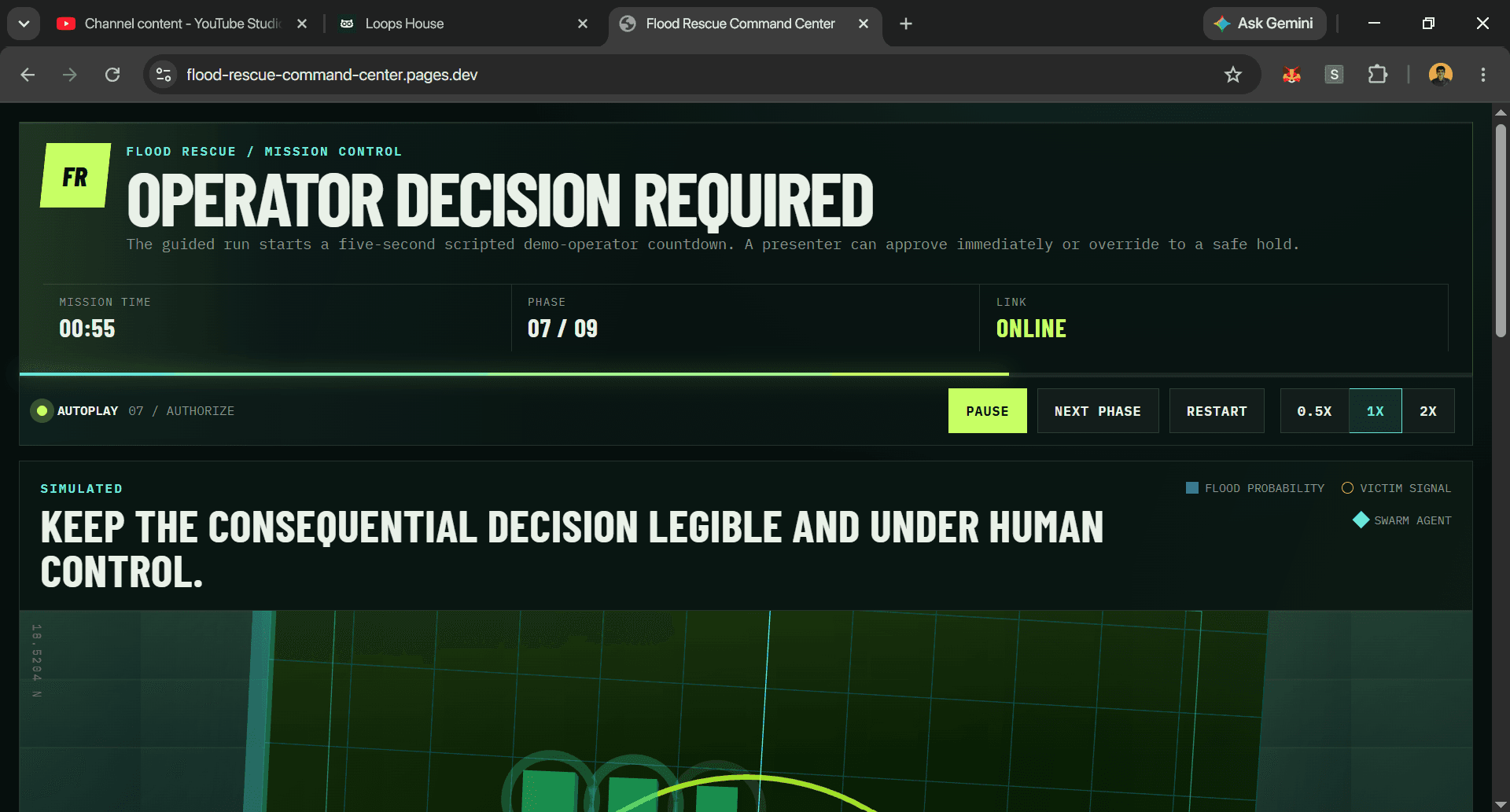
SkySwarm
An AI command center that turns satellite flood intelligence into safe, coordinated drone-swarm rescue actions in real time.
Codex Community Hackathon - Pune
Award
Top 10
Links
Team
1 member- PROwner
Pratik Daithankar
Overview
Flood Rescue Swarm is a disaster response command center that demonstrates how machine learning, reinforcement learning, cloud deployment, and human-in-the-loop safety can work together during flood rescue operations.
The core idea is simple: during a flood, responders do not just need a map. They need a system that can turn uncertain, fast-changing disaster intelligence into coordinated action. Flood Rescue Swarm shows that pipeline end to end. It starts from satellite-style flood perception, converts that into an operational flood belief map, identifies possible victim locations, assigns roles to a multi-drone rescue swarm, requests an RL-based coordination advisory, applies safety checks, asks for human approval, and then completes an aid-delivery mission.
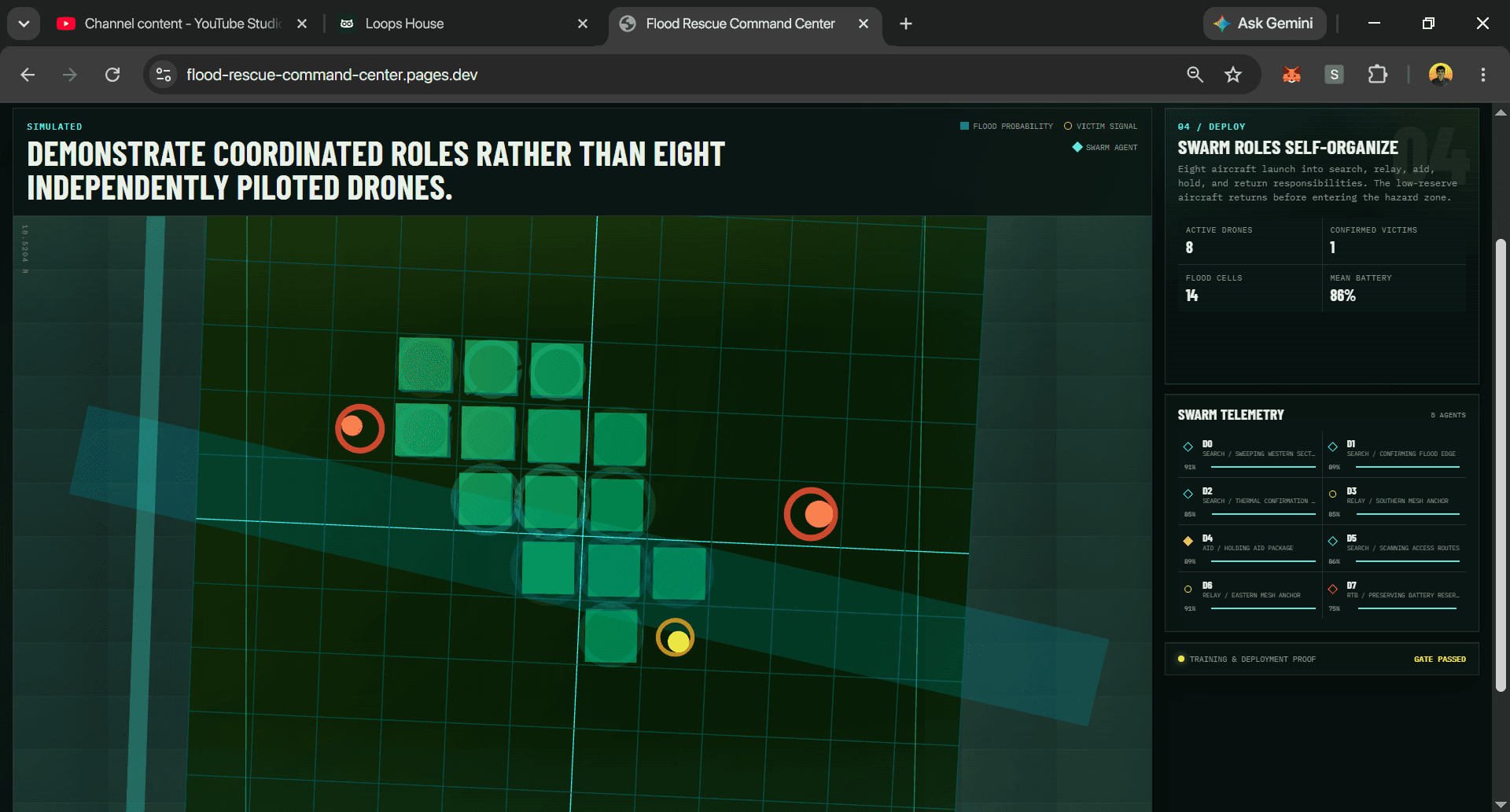
The project is designed around a realistic rescue scenario in the Pune Mula-Mutha corridor. The demo uses a guided nine-step mission flow: satellite intake, flood belief generation, victim triage, swarm launch, RL policy handoff, safety review, operator approval, aid delivery, and mission completion. Each phase is shown visually in a command- center interface rather than as a static dashboard. The frontend includes a cinematic mission theater with animated flood zones, victim signals, drone paths, relay links, route planning, approval state, and final mission completion. The goal is to make the system understandable to judges, operators, and technical reviewers within a short demo window.
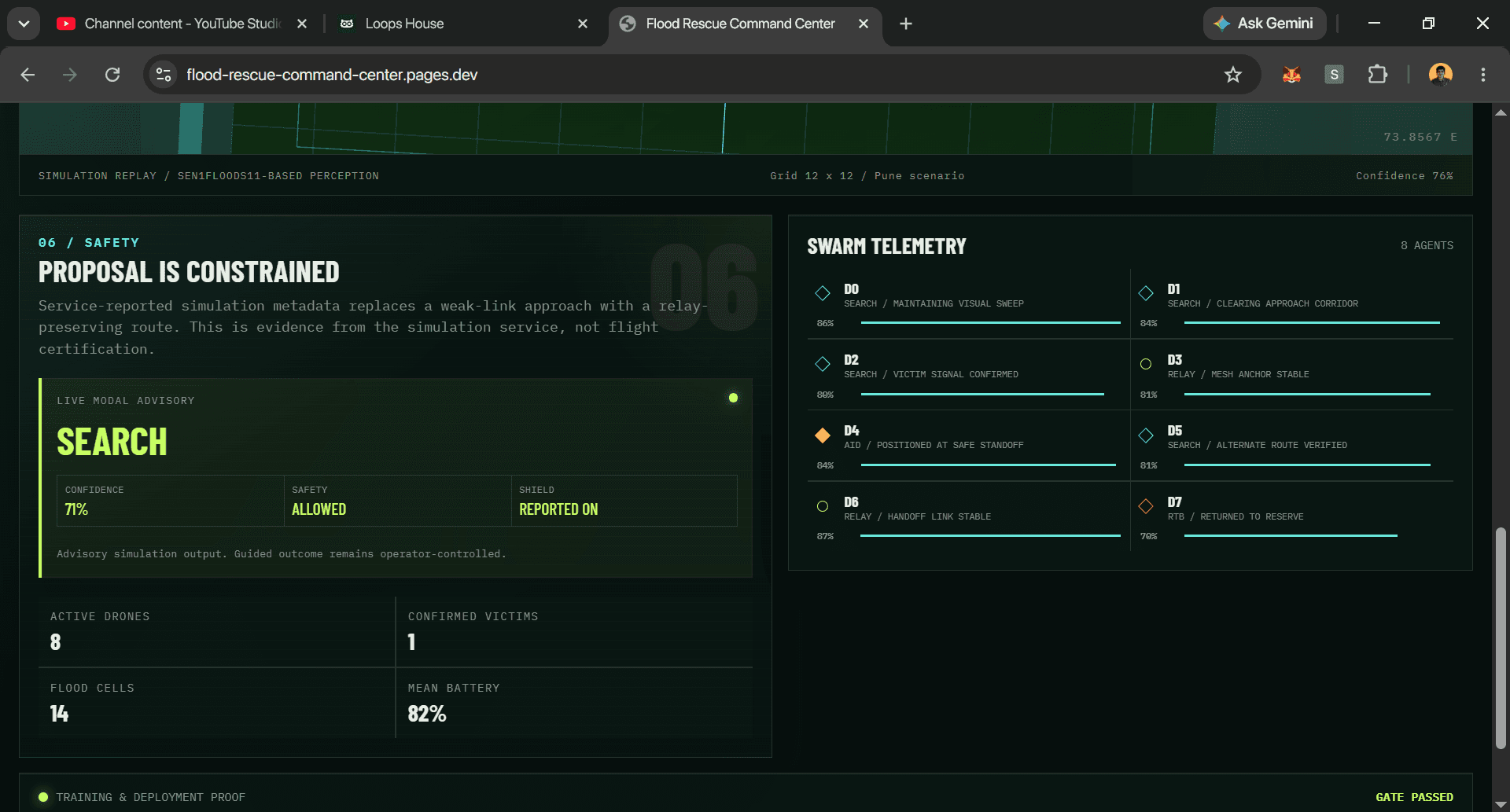
The machine learning portion is split into two parts. The first part is flood perception: the system uses a satellite- flood-style perception pipeline inspired by flood segmentation datasets such as Sen1Floods11. This turns remote sensing input into flood extent and uncertainty signals. The second part is reinforcement learning for swarm coordination. The RL policy is trained to propose rescue actions under constraints such as victim priority, relay continuity, drone battery, safe standoff, and whether an action requires approval. The model does not directly execute rescue actions. Instead, it acts as an advisory layer that recommends a route or action, exposes its confidence, and passes through a safety gate before an operator can approve execution.
A major design decision was to avoid presenting the AI as a magic autopilot. In real disasters, no two events are identical. Pre-training and fine-tuning help the model learn patterns, but the deployed system must still digest the current situation: updated flood extent, changing drone positions, battery levels, victim hypotheses, relay state, and safety metadata. That is why the demo is built as a real-time command flow rather than a one-shot prediction. The interface clearly separates replay data, model-generated information, simulated orchestration, live policy responses, fallback behavior, and human approval. This makes the project safer and more honest while still showing a high-impact ML/RL use case.
Technically, the project is deployed as a cloud-native prototype. The command-center frontend is hosted on Cloudflare Pages. The backend API gateway runs on Cloudflare Workers. The ML inference service runs on Modal, which is better suited for Python ML workloads and model-serving tasks. The frontend calls the Worker for health, proof, active model metadata, and mission proposal requests. The Worker then connects to the Modal inference service for the trained policy advisory. This separation gives the system a realistic production shape: edge-hosted UI, serverless API coordination, and dedicated ML infrastructure.
The current live demo is not just a static information page. It is an interactive visual command center. Users can play, pause, restart, move through mission phases, observe swarm roles, inspect proof metrics, see backend connection status, and view the policy proposal state. During the policy handoff phase, the frontend requests a live advisory proposal. If the service is unavailable, the system falls back to a clearly labeled scripted demo policy rather than pretending that live inference succeeded. This fallback behavior is intentional because disaster response systems should degrade visibly and safely.
For proof, the project records deployment and evaluation evidence. The release gate passed. The flood perception proof metrics include an IoU of 0.276872 and F1 of 0.433672 for the prototype evaluation path. The RL proof shows the candidate policy achieving a mean of 1 aided victim compared with 0 for the baseline in the recorded evaluation, with 0 safety failures. The live policy source is reported as “trained-modal-policy” with confidence around 0.708678. These numbers are not claimed as final production-grade disaster-response performance; they are included as transparent proof that the system has an actual training/evaluation/inference path behind the demo.
The project’s real-world impact is in the orchestration pattern. Flood response is a high-pressure environment where teams must combine satellite data, local observations, drone feeds, communication constraints, and human judgment. A normal dashboard may show where flooding is happening, but it does not help decide how a limited swarm should be used. Flood Rescue Swarm focuses on that next step: turning perception into coordinated, safety-gated action. It demonstrates how drones could be assigned to search, relay, aid delivery, reserve, and return-to-base roles while maintaining communication coverage and avoiding unsafe autonomous execution.
Compared with a typical hackathon demo, this project tries to go beyond “AI predicts X.” It shows an operational loop: perceive, prioritize, coordinate, review, approve, act, and report outcome. It also avoids hiding uncertainty. Weak victim signals stay unconfirmed. Boundary uncertainty remains visible. Model confidence is shown. Safety status is displayed. The operator approval gate is explicit. This matters because real-world AI systems in disaster response should increase responder confidence, not replace responder responsibility.
The project also demonstrates a practical deployment strategy. Cloudflare Pages gives the demo a fast, shareable frontend. Cloudflare Workers provide a lightweight edge backend for API routing and proof endpoints. Modal provides the ML execution environment for training artifacts and inference. This combination makes the prototype easier to demo while still resembling a deployable architecture: frontend on the edge, coordination API on serverless infrastructure, and ML workloads on a platform built for Python model execution.
In future work, the system could be extended with live Sentinel/SAR ingestion, real weather and river-level feeds, ROS2 or MAVLink-based drone simulation, stronger flood segmentation models, larger RL training scenarios, real operator feedback loops, audit logs, role-based access, and post-mission analytics. The same architecture could also support wildfire search, landslide response, medical supply delivery, or communication relay missions after infrastructure failure.
Flood Rescue Swarm is built to answer one question: what would it look like if an ML/RL system helped responders coordinate action during a flood, while still keeping humans in charge? This project is my answer: an edge-deployed command center, a Modal-hosted ML policy service, a safety-gated swarm orchestration loop, and a visual demo that shows the full rescue flow from satellite-style perception to mission completion.